in “A unified theoretical framework underlying the regulation of motivated behavior“, Yu-Been Kim, Young Hee Lee, Shee-June Park and Hyung Jin Choi explain that multiple psychological components have evolved in order to orchestrate behaviors for survival.
Despite several theories regarding behavior regulation, these theories do not clearly distinguish distinct components and do not explain the interaction between these components
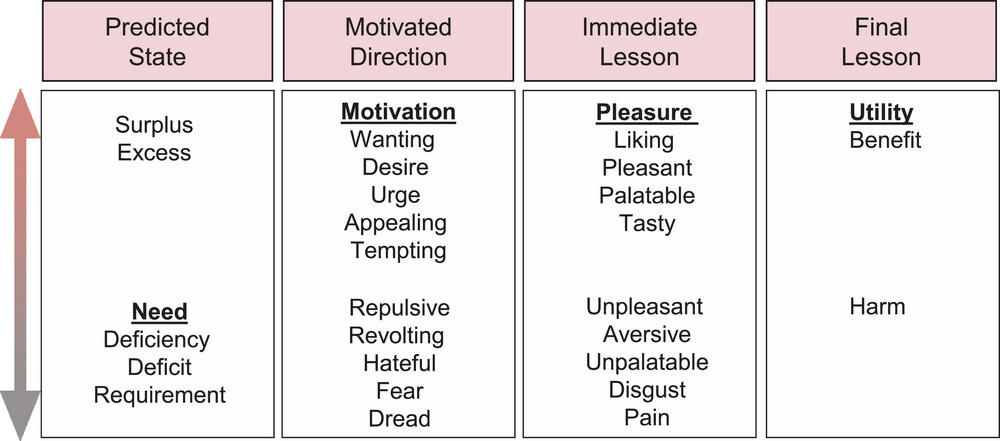
This article provides a unified theoretical framework of the psychological components that orchestrate behaviors. To optimize survival, there should be four components;
(1) “need”, an alarm based on a predicted deficiency.
(2) “motivation”, a direct behavior driver.
(3) “pleasure”, a teacher based on immediate outcomes.
(4) “utility”, a teacher based on final delayed outcomes.
For behavior stability, need should be accumulated into motivation to drive behavior.
Based on the immediate outcome of the behavior, the pleasure should teach whether to continue the current behavior.
Based on the final delay outcome, the utility should teach whether to increase future behavior by reshaping the other three components.
The article provides several neural substrate candidates in the food context.
The proposed theoretical framework, in combination with appropriate experiments, will unravel the neural components responsible for each theoretical component.

Imagine if you were creating a robot that could survive and reproduce in a world, where most of the information is unknown (e.g., which color object has nutrition or not).
How would you design the regulatory components of a behavior? A simple go/no-go algorithm system would not be sufficient to maximize survival and reproduction.
The robot requires complex algorithms, as follows;
(1) The robot should calculate internal and external information,
(2) The robot should initiate behavior directly,
(3) The robot should decide to sustain or abort the current behavior,
(4) The robot should decide which behavior will be appropriate for the future,
(5) The robot should update these algorithms from experiences.
The robot should have several distinct algorithms that are interconnected and updated through various experiences.

COMPONENT
#1: NEED— Predicted deficiency alarm
#2: MOTIVATION— Direct behavior driver
#3: PLEASURE— Teacher based on direct outcome
#4: UTILITY— Teacher based on final delayed outcome
Differences and interactions between pleasure and motivation
In general, it is widely acknowledged that motivation (cause of behavior) results in pleasure (consequence of behavior) in the forward direction (needn → motivationn → pleasuren →→ needn+1).
However, they mutually influence each other in a bidirectional manner, exerting an effect not just in the forward direction but also in the opposite direction. In the forward direction, the current pleasure (pleasuren) can influence the next motivation (motivationn+1). If the current pleasure (pleasuren)was not as rewarding as expected, which is called reward prediction error (RPE), the subsequent motivation (motivationn+1)would be less. In the reverse direction, if the current pleasure (pleasuren) is unsatisfactory, the current motivation (motivationn) drops immediately, causing animals to stop the current behavior (e.g., eating).
Differences and interactions between utility and pleasure
In general, pleasure and utility are being used interchangeably within the diverse “reward” context, “a reward in the form of pleasure (e.g., sweet taste in mouth)”, and “a reward in the form of benefit (e.g., increase in blood glucose)”. However, for animals to have an advantage in survival, they should distinguish the immediate outcome (pleasure) from the final outcome (utility). Furthermore, these two components interact with each other through a learning process, “ ”. Through experiences and learning, the utility updates the decoding algorithm of pleasure. For example, if you drink coffee for the first time, the bitter taste may be unpleasant. However, after good experiences with coffee, the previous unpleasant bitter coffee algorithm will be updated to a new algorithm that encodes a pleasant, delicious coffee with a bitter. Another example is the food poisoning caused by a raw oyster. Before food poisoning experiences, a raw oyster is pleasant. However, after a bad experience with food poisoning, the previous delicious raw oyster will be updated to be an unpleasant oyster. To adapt to the environment, this adaptive reshaping of the pleasure decoding algorithm by utility is beneficial (seek nutritious food and avoid toxic food).
